{kind=link}
{kind=link}
We uses cookies to ensure you get the best experience on our website.

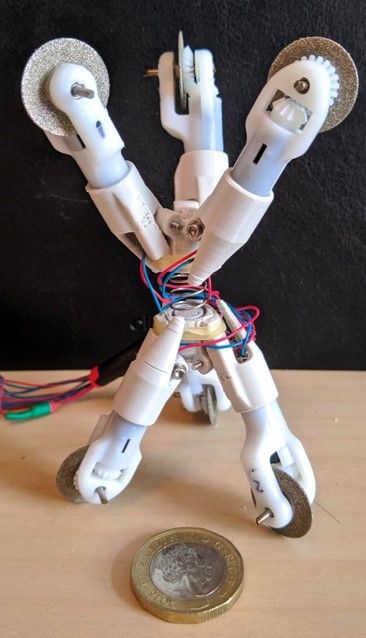
2” Pipe Bore Exploration, Inspection and Characterisation Robot
The PIBAIR is a small tethered platform designed for use in a 2” pipe network, capable of entering the pipe through entry points smaller than 2”, and traverse around pipe geometry to characterise and explore the space.
The PIBAIR can carry a gamma detector, but could be configured for a number of different sensors and applications within a 2” pipe environment.
We uses cookies to ensure you get the best experience on our website.