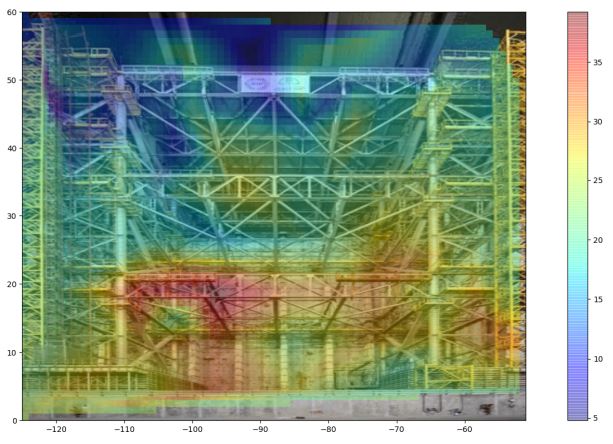
In October 2020, a Bristol University research team with engineers and scientists from the Interface Analysis Centre deployed a semi-autonomous robot for remote radiation inspection inside the Chornobyl Nuclear Power Plant (ChNPP) in Ukraine. The objective of this visit was to create a radiation map of the western wall of the Shelter Object, known as the Sarcophagus, a temporary containment structure hastily erected over the remains of Reactor 4 in the aftermath of the accident on 26 April 1986. The Shelter is facing structural integrity challenges and will need to be dismantled the upcoming years to take the contained reactor remains apart.
By deploying a specialised sensor system called YanDavos on Boston Dynamics’ quadrupedal robotics platform Spot, the researchers were able to acquire an accurate dose rate map of the Shelter’s wall without exposing humans to high radiation levels. Spot moved the sensor system into position in an environment where the dose rate exceeds 100 µSv/h, a hazardous radiation level for humans, and remained there until the scan was completed. YanDavos was designed and developed at Bristol University by RAIN researchers, and combines state-of-the-art gamma spectroscopy, simultaneous single point Lidar ranging and 15 FPS solid state Lidar ranging with 4K cameras to produce detailed radiation maps that can be used to plan decommissioning activities. Spot also completed a radiation mapping test around the outer perimeter of the Shelter as a training exercise for its radiation mapping algorithms.
You can watch the documentary excerpt for Ukrainian TV here, and a feature on the RT news network Ruptly here.