
We recently saw the first culmination of a joint RAIN demonstrator project with the Atomic Weapons Establishment (AWE) and the Universities of Manchester and Bristol. The ‘Unknown Room’ project has seen the two university teams develop a pair of robotic platforms with an in-common interchangeable gamma and neutron detection system. The challenge is to survey a high hazard facility to determine the location, energy and character of any radiation sources. This detailed understanding of dose and criticality risk in the facility will allow decision makers to devise a manned or robotic strategy for decommissioning.
A ‘White’ demonstration was conducted in the basement of the School of Physics in Bristol over a 2-day period with 12 observers from the AWE. The test included 3D mapping of a long section of corridor with sealed radiation sources placed in specific locations to simulate the presence of radiation hotspots.

Two radiation detection systems were demonstrated. Firstly, a mapping system for combined gamma and neutron measurements requiring the robots to execute a serpentine survey pattern from one end of the corridor to the other and covering a lot of the available area. Second, a collimated scanning system, developed by Bristol Spin-Out company Imitec ltd. which provides a coincident laser and gamma spectrometry scanning. This second system is deployed by navigating the robots into one or more strategic positions to conduct a 3D scan of its surroundings out to ~10m.
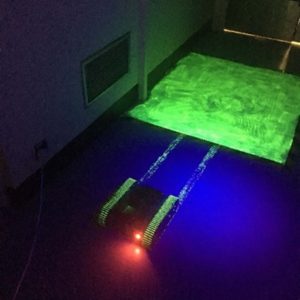
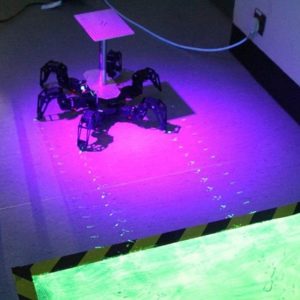
A contamination pickup survey of the robotic platforms was also conducted using non-toxic fluorescent tracer powders. A powder contaminated zone was setup to simulate fine radioactive particle contamination, such as likely to be found in the damaged Fukushima reactor buildings.
The two robots, one hexapod (walker) and a tracked crawler, alternately traversed the contaminated area and a UV light sources and high-sensitivity camera was used to image the contamination pickup on the robots and the spread of contamination on the floor.
The results clearly showed that walking robots have a significantly better contaminant pickup performance versus tracked robots making them better suited for indoors radiation mapping applications. Any particulate contamination on the floor would be substantially picked up by the tracked robot, and depending on the radioactivity could substantially offset the ongoing radiation mapping being performed. This could mean that low activity areas could be misrepresented as having much higher radiation due to the mapping system inadvertently measuring the contamination being carried by the robot and not the surrounding facility.
With a successful ‘White’ demonstration in hand, the RAIN team will now implement further modifications and upgrades suggested by the AWE. Then in February 2019, the team will go ‘Red’ with a first deployment at the Aldermaston site. The team are confident of success, knowing that a successful deployment will make a real difference in the industry’s perception of robotic systems for solving some of the thornier challenges that the industry faces.