{kind=link}
{kind=link}
We uses cookies to ensure you get the best experience on our website.

Spatial mapping and orientation detection of objects
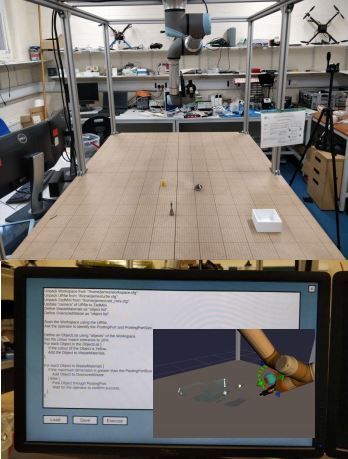
Robot generated VR for scene modelling
Accurate spatial mapping enables robots to find objects in the workspace and is essential for automated handling. The 3D models obtained can inform both the robot and the operator about handling options. Cloud point generation provides the location of objects and this is complemented by recognition within a set of objects. The models are converted into a VR model that includes real-time modelling of the robot arm and the glovebox frame as well. The VR models can be used by the robot for planning suitable attitudes of the gripper and arm to handle objects for activities such as repositioning, drilling cutting, dusting etc.
UR5e and UR10 robots with two and three fingered grippers, 3500 Cuda cores embedded PC for deep learning, cloud point generation and real-time VR generation,rem ote operator desk with 22” monitors displaying a VR model and live video of the complete inside of the glovebox.
Operator reconfigurable system
To reduce operator stress and increase productivity, natural language sEnglish texts are used to provide an operational framework for nuclear material handling in robotic glove boxes. This framework includes.
UR5e and UR10 robots with two and three fingered grippers, 3500 Cuda cores embedded PC for deep learning, cloud point generation and real-time VR generation, remote operator desk with 22” monitors displaying a VR model and live video of the complete inside of the glovebox.
We uses cookies to ensure you get the best experience on our website.