{kind=link}
We uses cookies to ensure you get the best experience on our website.

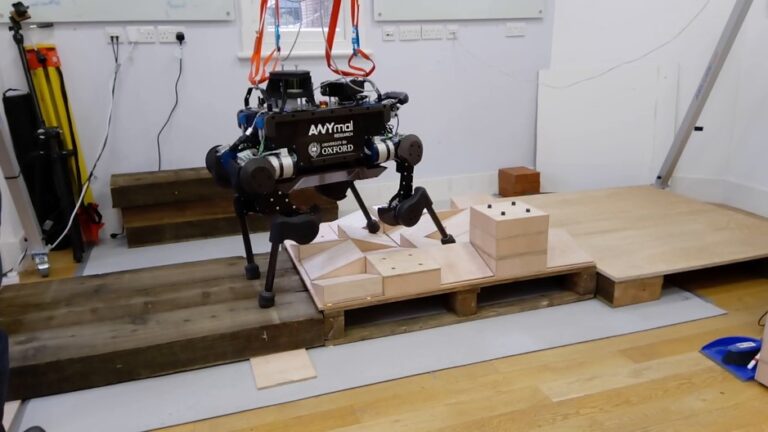
Remote Inspection on difficult terrain
ANYmal B is a quadruped robot able to walk over difficult terrain and over many kinds of surfaces such as gravel, grass and mud. It is able to climb over stairs or obstacles which greatly enlarge its range of applications with respect to a wheeled robot. In addition to its embedded sensors the robot can carry an additional 5kg payload, which can be used to place extra equipment such as an infrared camera, a radiation sensor or a small robotic arm. Through RAIN the Dynamic Robot Systems (DRS) laboratory develops new locomotion algorithms that improve the versatility of ANYmal B and allow it to take decisions in autonomy such as where to place its feet to overcome large obstacles or in which directions it should move in order to map the environment and explore new unknown areas. This is achieved thanks to the group’s expertise in the fields of machine learning, control and perception.
We uses cookies to ensure you get the best experience on our website.