MallARD is an autonomous, water surface vehicle designed for inspection and monitoring of ponds. The platform was designed in response to the 2017 IAEA robotics challenge to provide an autonomous USV for conducting verification activities on spent fuel based on Cerenkov radiation detection.
MallARD has successfully passed through the first two stages of the challenge and is being prepared for field trials and its final evaluation.
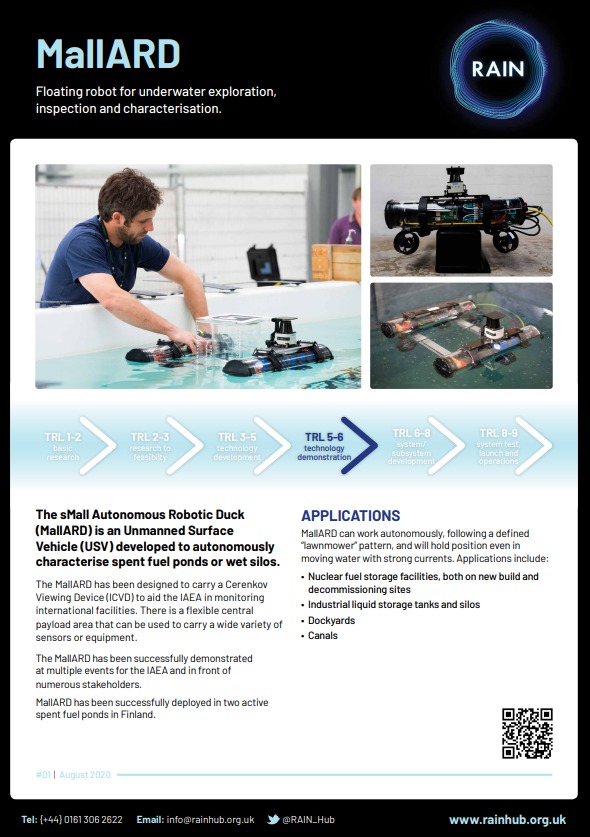
MallARD is built around a flexible central payload area that presently setup to carry a Cerenkov radiation detection camera. The platform has a passive stabilisation system provided by careful design buoyancy design, mass positioning and thruster location. The system has 4 thrusters, 2 in the x direction and two in the y direction meaning it can move in any direction whilst maintaining its orientation.
{kind=link}