
As part of the RAIN project, the Remote Inspection Working Group (RIWG) has been developing a range of technologies to allow autonomous ground vehicles to characterise and monitor facilities that process and store waste from the nuclear industry. As part of this work, we have been developing a relationship with the UKAEA Waste Consignments team in Culham. In this relationship we have been working to understand the different requirements the UKAEA team have for autonomous systems in monitoring and managing temporarily stored waste, and helping them understand the technology currently under development in the RAIN consortium. As part of this process, UKAEA have allowed us to trial various robotic inspection systems in their low hazard drummed waste store in Culham.
Over winter 2019/20 the RAIN Remote Inspection Working Group made multiple visits to this Culham store with robots from RAIN and a related Innovate UK project.
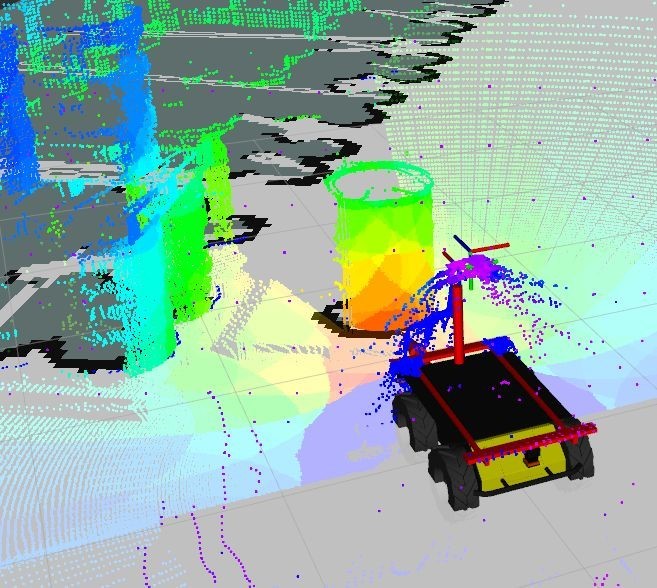
We tested the RIWG Husky, which is capable of detailed visual, structural and gamma spectroscopy inspection of 3D volumes such as waste drums. A video explanation of this system in controlled settings can be seen here, and an image of it in situ at Culham is below.

We also used this visit to test the autonomous navigation of the Husky in typical waste storage settings.
As part of the joint Oxford Robotics Institute-Createc Innovate UK project Smart Radiation Sensor for Intelligent Nuclear Robots led by Maurice Fallon and Ioannis Havoutis, we are integrating gamma activity mapping technology from Createc with the autonomous capabilities of some ORI robots. On our visits to Culham we tested two such robots performing radiation surveys of a low hazard waste store. Below you can see an Anybotics Anymal and a Clearpath Jackal carrying the Createc sensor and mapping areas of interest within the store.
In the time remaining in RAIN we will continue to visit Culham and increase the autonomy of these systems. Our aim is to provide a mobile robot capable of repeated autonomous inspections (e.g. on a daily) basis, with minimal human input.