
RAIN researchers, from the Universities of Bristol and Manchester, have been working together to develop a new submersible remote inspection platform.
On Sellafield site there are a series of manmade legacy ponds. These ponds were originally intended for the short term storage of nuclear waste. However, many of the ponds have stored nuclear materials for longer than anticipated. Extended storage has led to the decay and corrosion of the stored nuclear waste products, resulting in a complex chemical environment within the ponds.
To aid the research into this environment, the RAIN hub has added a waterproof casing to a remote inspection Raman system, developed at the University of Bristol. Combining this waterproofed inspection tool with a BlueRobotics® BlueROV2 submersible robotic platform has created a new Raman Inspection Platform, capable of analysing environments at depths of up to 100 metres.
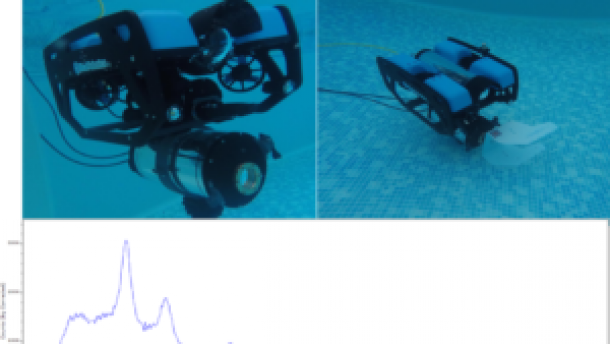
Recently, the Raman Inspection Platform was deployed in a controlled environment to assess its functionality. We successfully obtained results from a range of different materials including paints, plastics coatings and iron oxide. Next, RAIN researchers from Manchester will work to further verify the platform prior to a demonstrational deployment at Sellafield.