RAIN researcher’s Dr Rafael C. Cardoso and Dr Angelo Ferrando were not able to go to their secondment at the National Institute of Standards and Technology (NIST) in the US because of the COVID-19 pandemic. Instead, they have been collaborating virtually with NIST in two different projects.
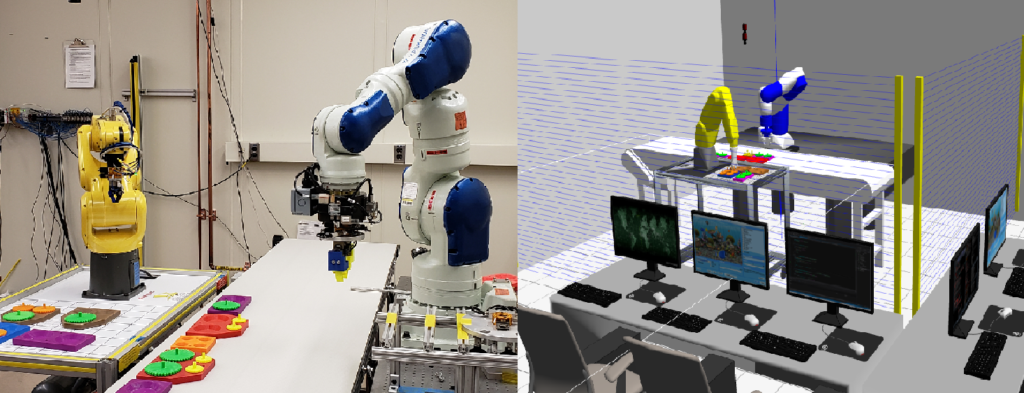
Dr Cardoso is leading the project on agile tasking of robotic systems with explicit verifiable autonomy. Task agility is an increasingly desirable feature for robots in application domains such as manufacturing. The Canonical Robot Command Language (CRCL) is a lightweight information model built for agile tasking of robotic systems by NIST. CRCL replaces the underlying complex proprietary robot programming interface with a standard interface. In this project, we exchange the automated planning component that CRCL used in the past for a rational agent in the Gwendolen agent programming language, thus providing greater possibilities for formal verification and explicit autonomy. We have evaluated our approach by performing agile tasking in a kitting case study.
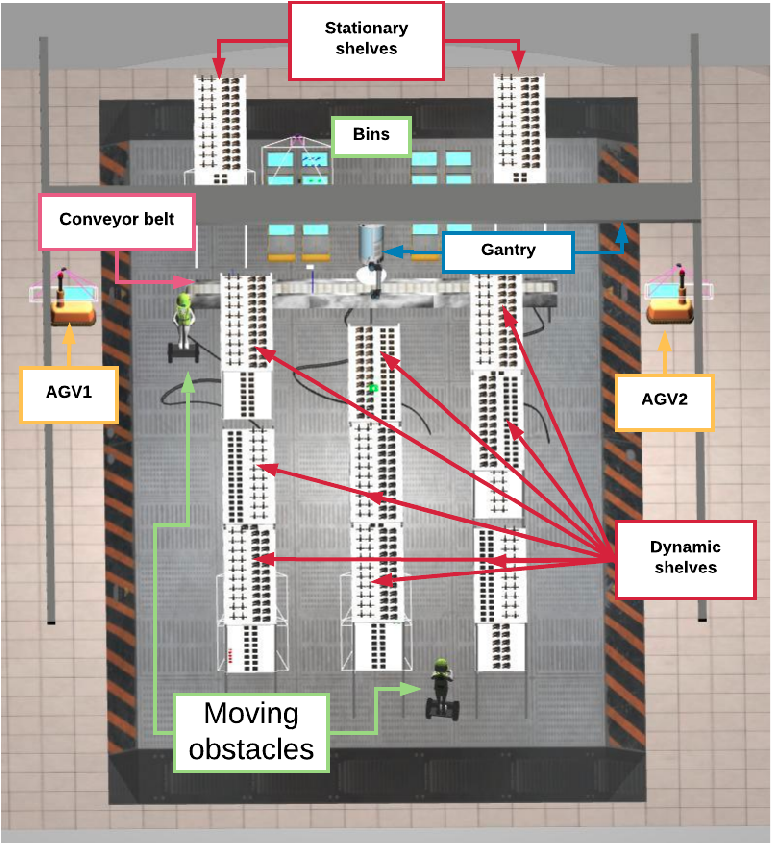
Dr Ferrando is leading the project on runtime verification of the ARIAC (Agile Robotics for Industrial Automation Competition) competition. ARIAC is a robotic competition which aims to advance robotic agility in industry. Participants in this competition are required to implement a robot control system to overcome agility challenges in a simulated environment. ARIAC comes with a set of score metrics to evaluate the performance of each control system during task execution. In this project, we show how such task-oriented evaluation can be problematic and how the addition of runtime monitors to verify properties given in ISO/TS safety standards can help in reducing the resulting reality gap. In particular, we focused on an initial case study where a safety property given in ISO/TS 15066:2016 is used to synthesise a monitor.