
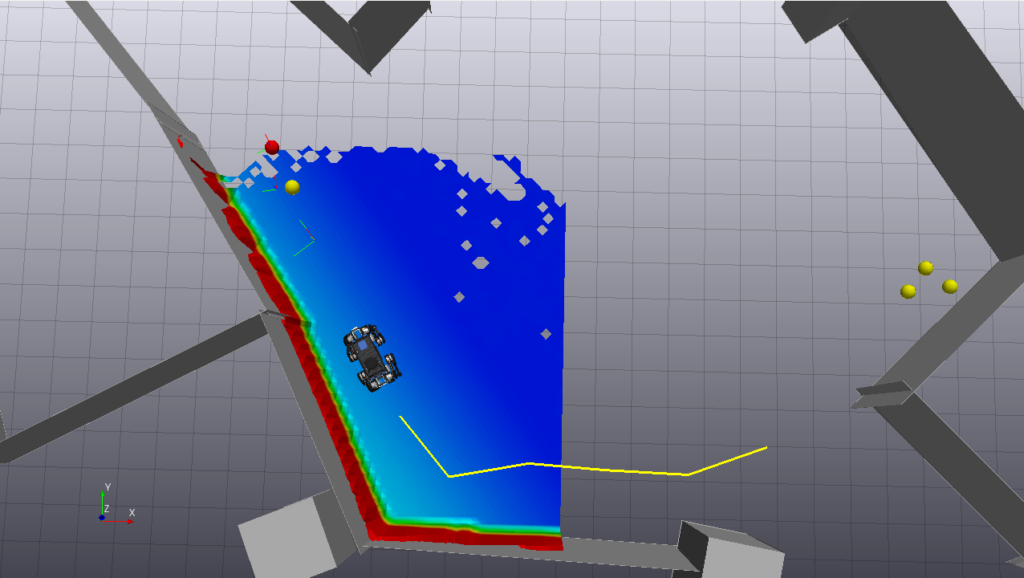
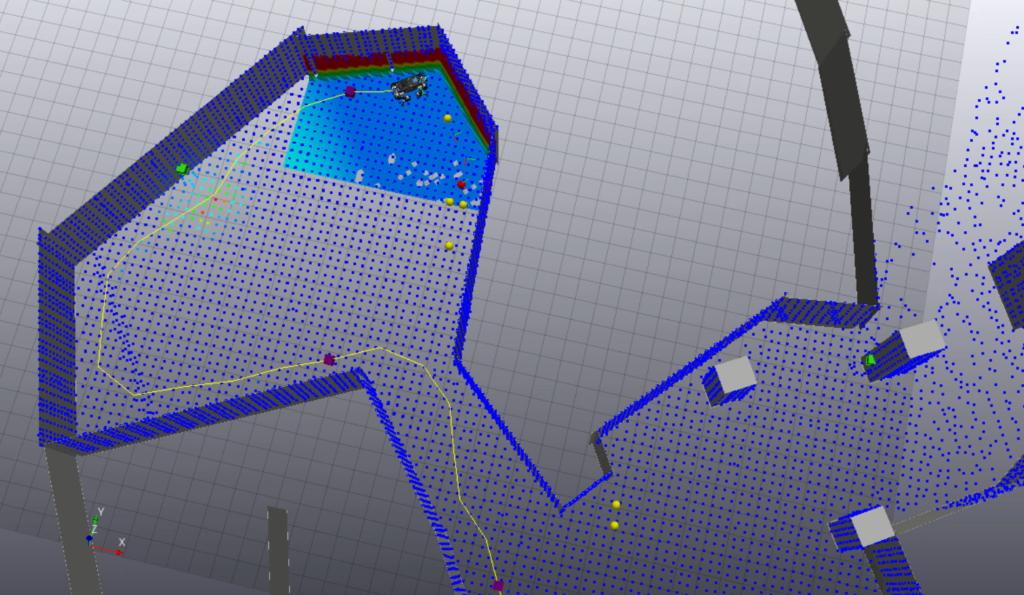
As part of its participation in the RAIN hub, the Dynamic Robotics Systems Group (DRS) of the Oxford Robotics Institute (ORI) has developed a general purpose autonomous exploration planner dubbed: the Terrain Explorer. The Terrain Explorer integrates with external volumetric sensors (either a 3D scanning LIDAR or depth cameras) to build a 3D representation of the robot’s surrounding and to autonomously expand it. To date, the modular system has been integrated with several robots including the ANYbotics ANYmal, the ROSS robotics EXTRM rover and a Clearpath Husky. The Terrain Explorer has enabled the ORI to carry out fully autonomous robotic inspections in complex environments including exploring a UKAEA nuclear storage facility and a vast underground mine. The system integrates with the ORI’s VILENS SLAM system to produce complete LIDAR maps of the explored environment.
To employ this system in a radiation environment, ORI has partnered with Createc to deploy a modularised version of their NVisage® / RECON system as part of an Innovate UK funded project. This system adds an overlay to the LIDAR maps detailing the radioactivity of all points in the observed map. The modularised system means that only those software and hardware components not already native to the robotics platform need to be integrated. For the majority of the trials performed, Createc provided a CZT gamma detector and the NVisage® radiation mapping software.
The Terrain Explorer is an open-ended planner which explores an arbitrary space. The system can be constrained by setting a perimeter or time limit for exploration. The planner automatically returns the robot to its starting position after exploration has been completed or should other external factors such as a battery warning be triggered. To do this it takes advantage of the pose graph representation with Oxford’s SLAM system – with the poses acting as a highway to enable efficient backtracking and re-routing. Additionally the system is able to handle communications blackouts by recursively returning to areas where communications previously met a quality of service baseline. Additional features such as preferentially following the perimeter of the space can be configured to take advantage of prior knowledge of the environment.
Several trials have been performed to prove the capabilities of the integrated systems: the system was deployed to an underground mine complex to prove the robustness of the planner in an unstructured and irregular environment. This video shows the robot exploring the entirely unlit facility – using only its own on-board lighting.
Here you can see the system has also been tested in a low-hazard drummed waste store at the UKAEA site in Culham.
A final demo for the project is planned at Createc’s Cockermouth testing facility on 18th February to demonstrate the results of the collaboration through the RAIN Hub’s seminar series.