
In the film Prometheus (2012) a team of astronauts explored the underground lair of the mysterious “Engineers” and used a flying device to quickly map the environment. Slightly less mysterious engineers in Oxford Robotics Institute have developed a handheld mapping device capable of mapping large facilities at walking speed.
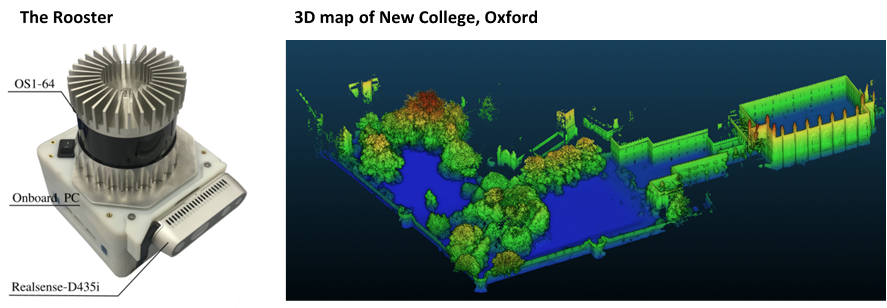
 The “Rooster” mapping device integrates LIDAR, stereo-vision and a PC for computation. Using a combination of visual-LIDAR odometry and the detecting loop closures using visual place recognition the team can build accurate 3D maps in real-time. The original method was described in this ICRA 2020 paper (led by Dr. Milad Ramezani) while the dataset from Oxford’s New College is available on this website.
The “Rooster” mapping device integrates LIDAR, stereo-vision and a PC for computation. Using a combination of visual-LIDAR odometry and the detecting loop closures using visual place recognition the team can build accurate 3D maps in real-time. The original method was described in this ICRA 2020 paper (led by Dr. Milad Ramezani) while the dataset from Oxford’s New College is available on this website.
 Dr. Maurice Fallon’s team have since integrated the SLAM system on a Clearpath Husky and a new Ghost Vision quadruped and explored an underground facility near Oxford in March with future plans to automate the team of exploring robots.
Dr. Maurice Fallon’s team have since integrated the SLAM system on a Clearpath Husky and a new Ghost Vision quadruped and explored an underground facility near Oxford in March with future plans to automate the team of exploring robots.
Prometheus ended badly for the “Engineers”, ORI’s engineers are aiming to make it out of COVID – with their sanity intact.