{kind=link}
{kind=link}
{kind=link}
We uses cookies to ensure you get the best experience on our website.

Rapid creation and evolution of simulation environments
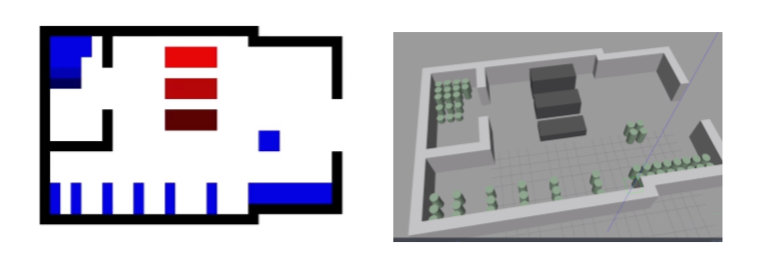
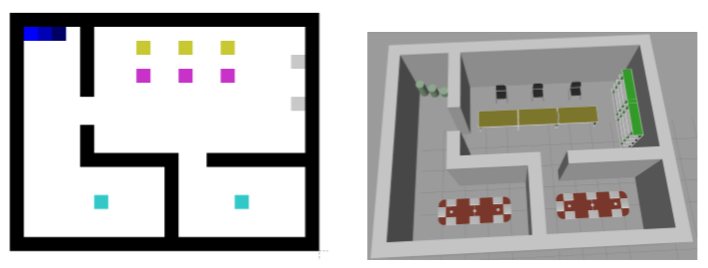
The World Builder Toolbox offers a set of tools to allow for the rapid creation of environments from pixel representations, incorporating primitive models, meshes or CAD models. It has been designed to work with the Robotic Operating System (ROS) and its preferred simulation environment, Gazebo. The main advantage these tools offer is it gives the user the ability to quickly develop complex environments made of unique elements meant for the testing of mapping, exploration or monitoring algorithms.
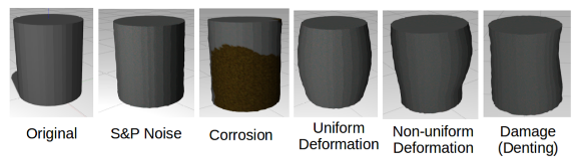
The World Builder Toolbox offers users the ability to rapidly create environments from pixel representations of environments, incorporating primitive models, meshes or CAD models. These environments can then be imported into gazebo and used for running simulated missions such as visual inspection, mapping or monitoring. The toolbox also offers the ability to make each element in the environment unique as to increase the difficulty of monitoring missions, as well as offering the ability to degrade the environment between missions to simulate the passage of time, adding effects such as corrosion/discolouration, swelling and damage to models.
These tools will allow for missions/algorithms to be run off-site prior to deployment in a variety of scenarios to help validate the work.
To help the development of these tools researches and industry could give them a go, find bugs, produce feedback and even offer suggestions of features they would like to include.
The World Builder Toolbox is designed to be used with ROS and can generate worlds meant for Gazebo, but could be used with any simulation tool which accepts the SDF format. It has also been designed to integrate with the simulated radiation sensors and sources also produced as part of the RAIN Hub.
We uses cookies to ensure you get the best experience on our website.